Gyroscope + Kickboard

Problem Defintion
The increasing use of personal mobility devices has led to a rise in traffic accidents, highlighting the need for enhanced safety measures. As of the first half of 2021, 73.9% of reported electric scooter accidents involved slipping or falling due to poor road conditions. User surveys revealed dissatisfaction with unstable rides caused by uneven or poorly maintained roads. This project aims to design an electric kick scooter that improves lateral stability to address these road-induced issues.
Experiment Design
• Initial Speed Condition 0 km/h → 25 km/h (uniform accelerated motion in 6.0 seconds)
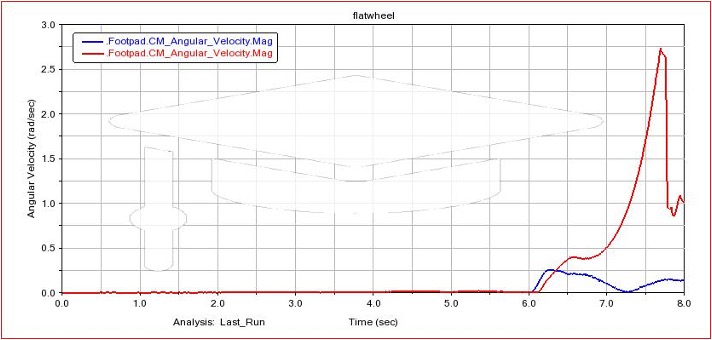
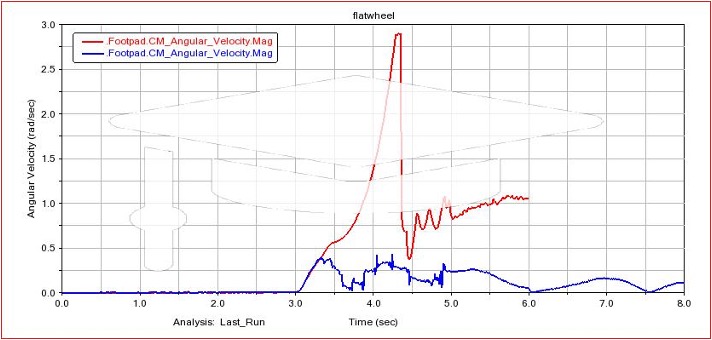
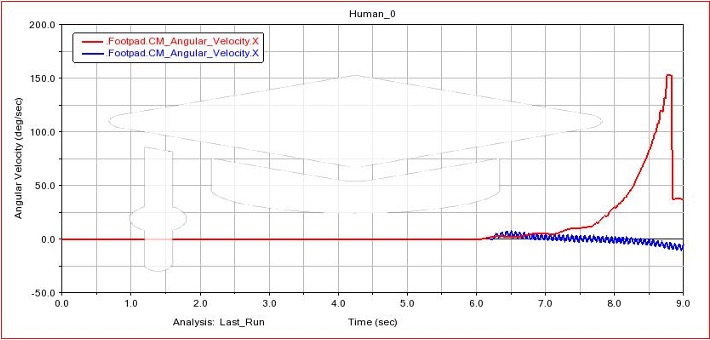
Result Graph
Experiment 2
Experiment 3
Experiment 5
Discussion
In this study, we successfully demonstrated that the gyroscopic effect can control the lateral moment of electric kick scooters, enhancing stability on uneven surfaces by generating a restoring torque. Achieving complete control over unstable terrains requires refining the control mechanism, potentially using multiple rotating bodies to distribute mass effectively.
Additionally, Experiment 5 revealed that the high density needed for stability poses challenges for practical manufacturing, necessitating optimization of mass and moment of inertia for real-world feasibility.